Implementations Distributed Robotics
Multi-Agent Coverage Control
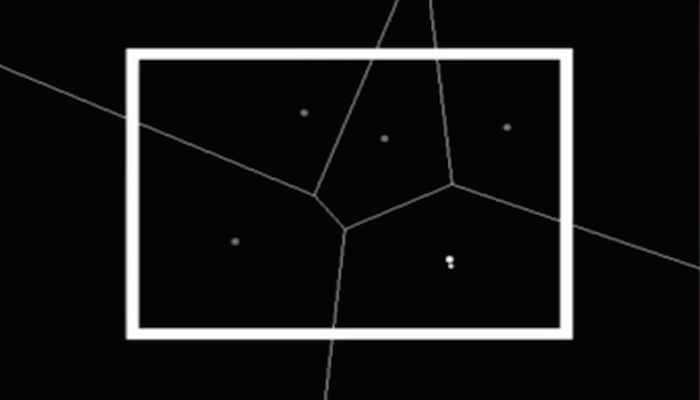
The purpose of multi-agent coverage control is to direct agents (robots) to cover a space as best they can. In this section you will find information on how Voronoi Diagrams are being used by the MURO lab for coverage control. Fortune's algorithm is also highlighted as a principle piece of the coverage control algorithm along with other centroid finding algorithms.
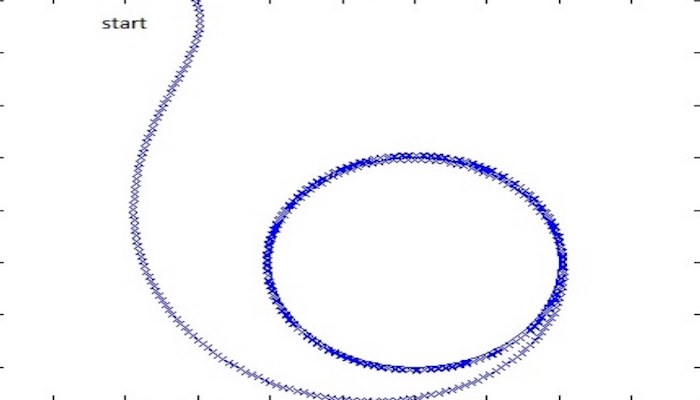
Cyclic Pursuit
"Global Path Following for the Unicycle and Other Results" by Mohamed I. El-Hawwary and Manfredi Maggiore, provides a robust method for unicycle (TurtleBot) dynamics. Open this section to find our more.